|
|
|
|
|
|
|
|
|
|
|
|
 |
 |
Tulsiani, Su, Guibas, Efros, Malik. Learning Shape Abstractions by Assembling Volumetric Primitives. In CVPR, 2017. (hosted on arXiv) |
|
|
|
|
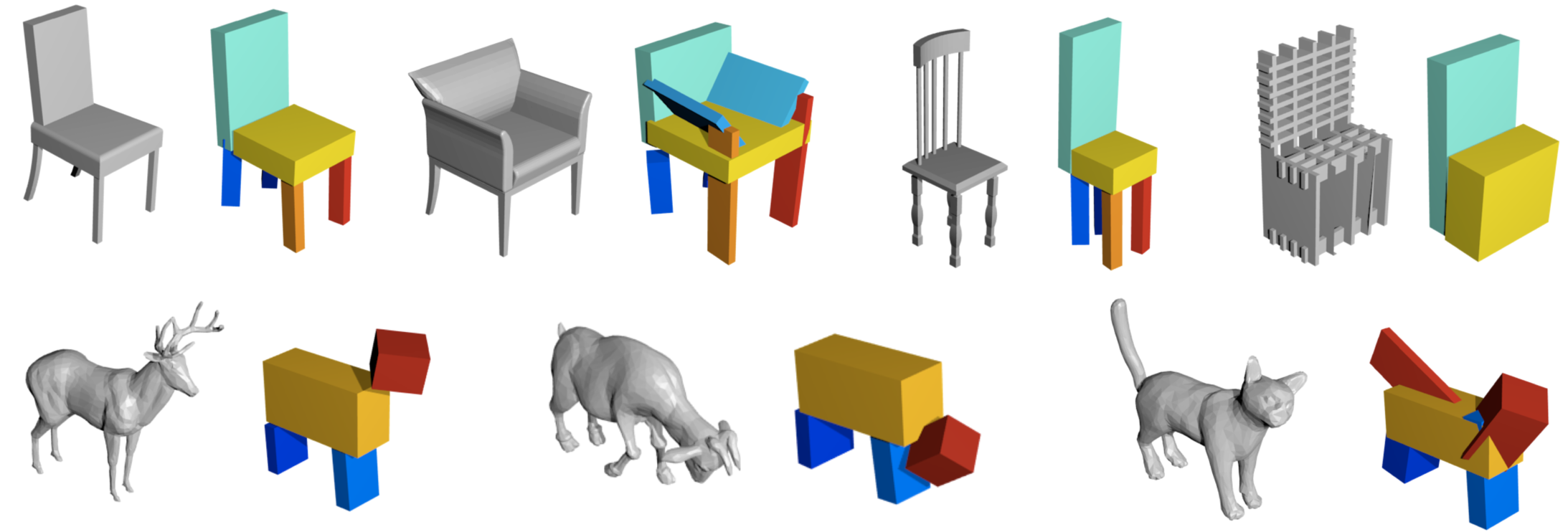
 Unsupervised parsing obtained by assigning each mesh point to the closest primitive. We see that similar parts e.g. aeroplane wings, chair seat, etc. are consistently parsed. |
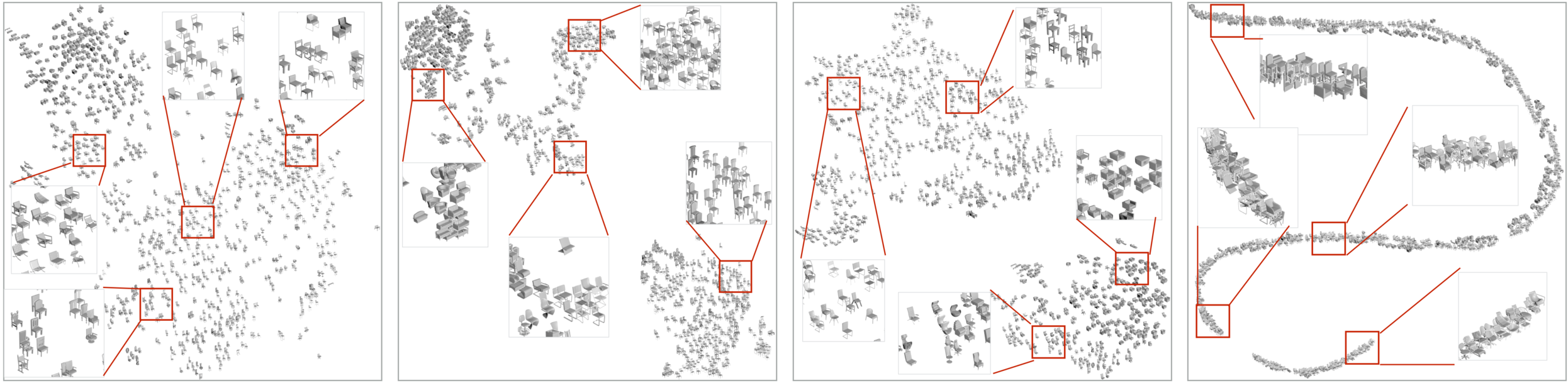 Embeddings obtained using various similarity measures - a) Voxel IoU b) Ours (all primitives) c) Ours (seat and back primitives) d) Ours (back primitive orientation). |
 Deformation of the source mesh (top) to have a shape similar to the target mesh (bottom) by using the inferred primitive representation. |
Acknowledgements |